
Parametric Robotic Hot-Wire Cutting
Rhino, Grasshopper, ABB Robot Program
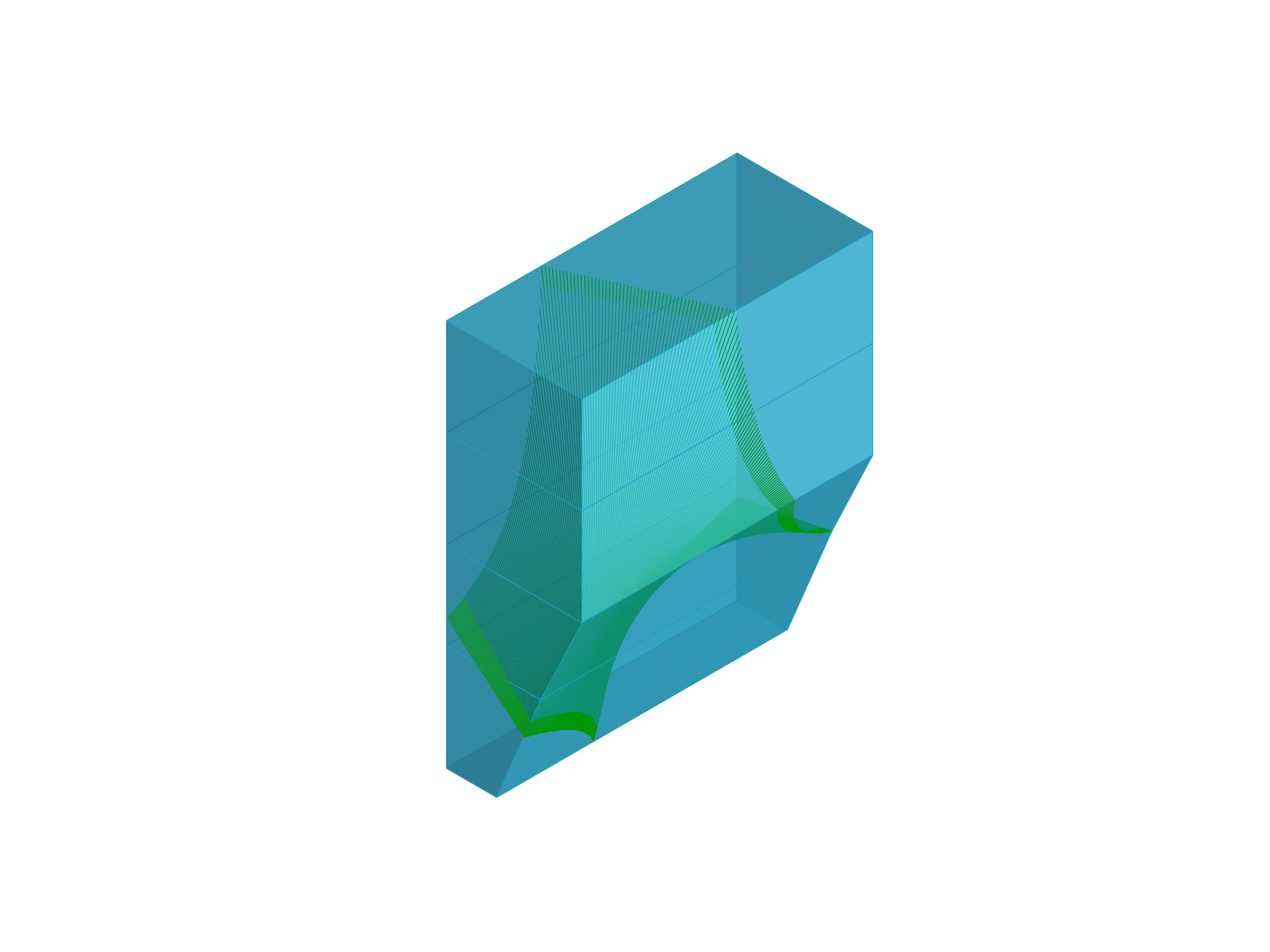
This project explores how robotic hot-wire cutting can be integrated into a computational design workflow to generate complex foam geometries. Using Grasshopper to simulate robotic motion, the study develops a digital-to-physical pipeline in which form is first constructed through parametric operations—bounding boxes, trimmed meshes, lofted surfaces—and then translated into robotic toolpaths. The robot executes sequential cuts that reveal variations in curvature, surface continuity, and material behavior. The physical models demonstrate how computational logic and robotic precision can collaboratively shape architectural form.
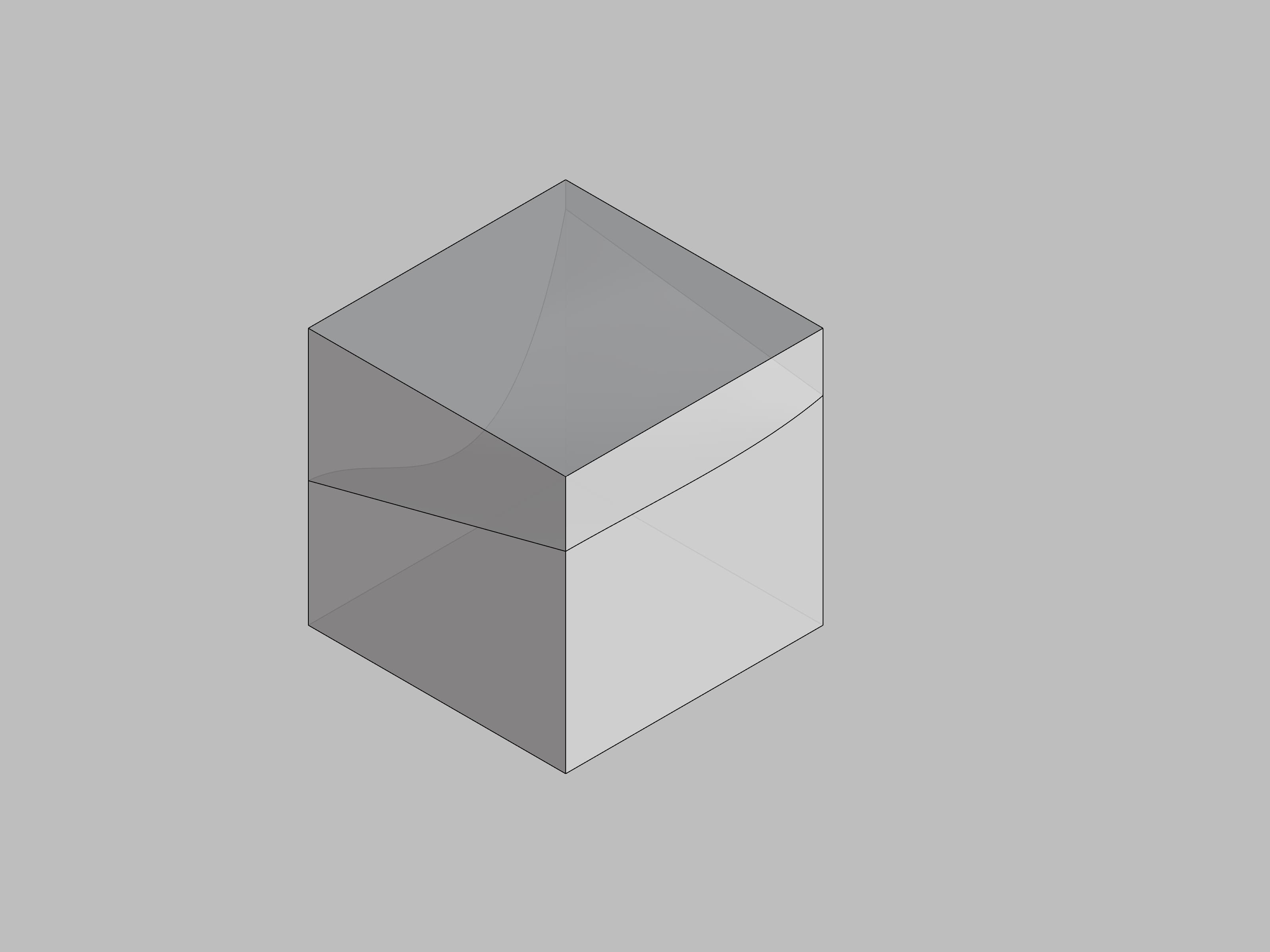
HOT WIRE CUT _ PHASE 1 _ FORM DESIGN


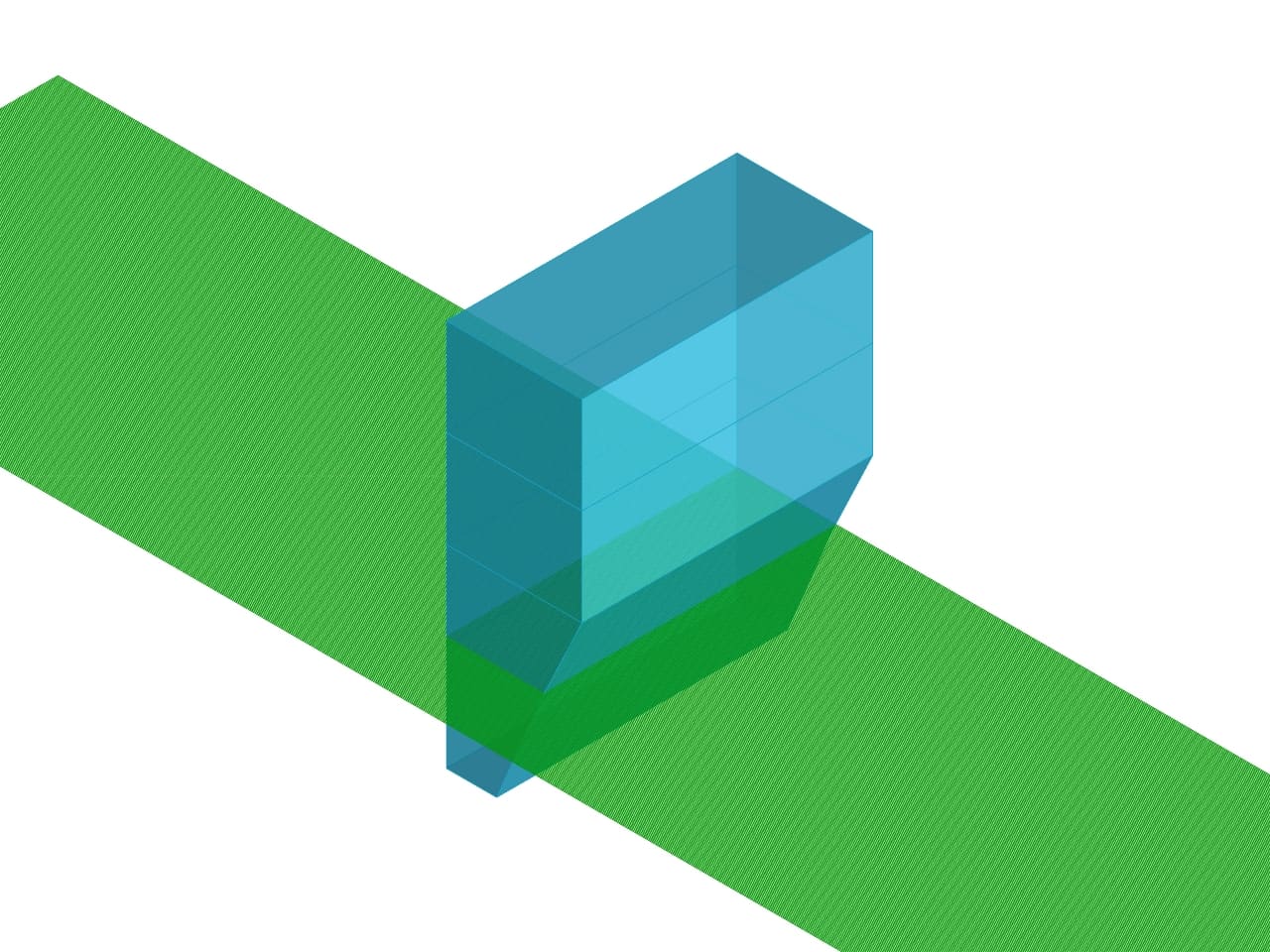
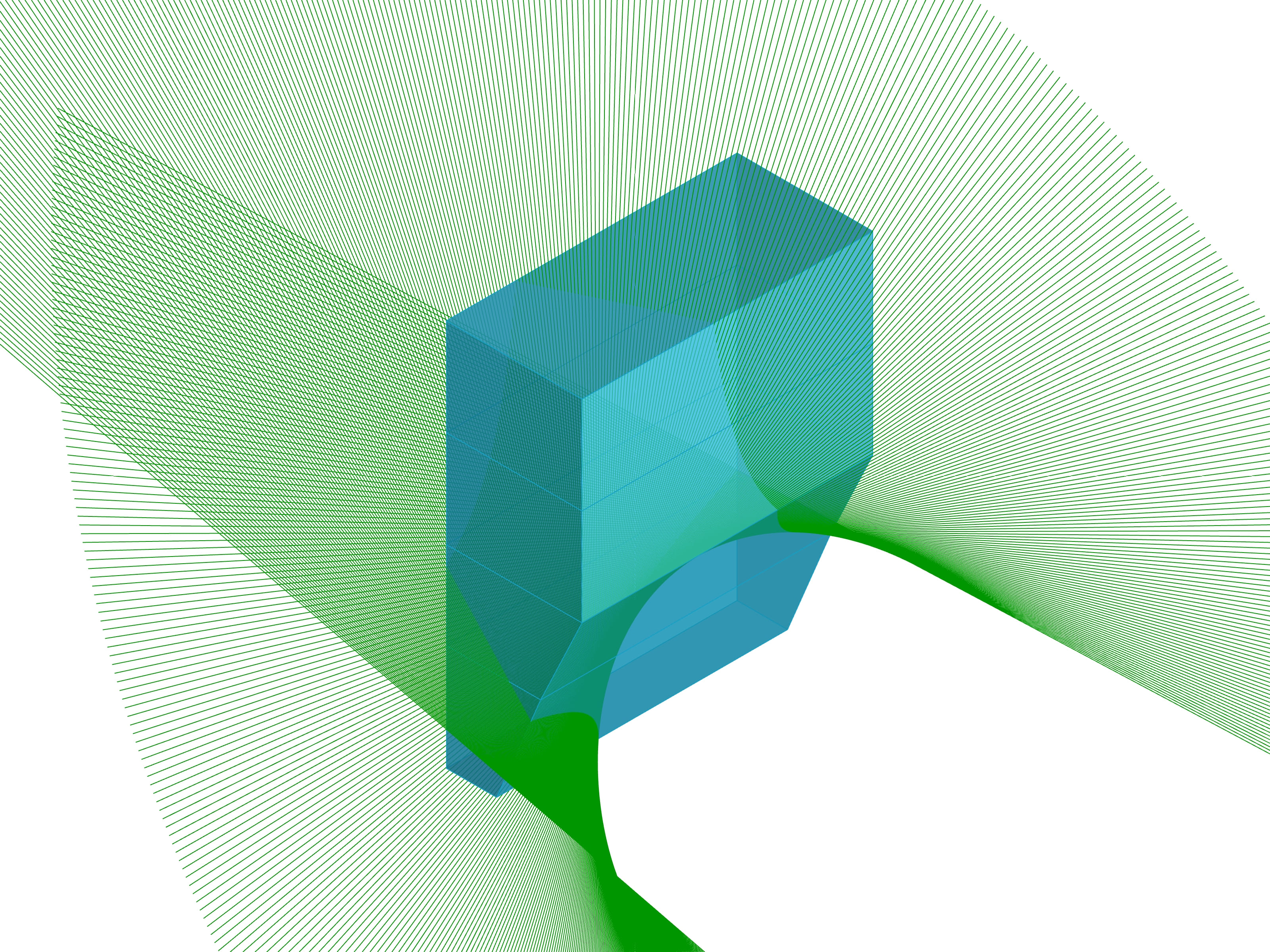

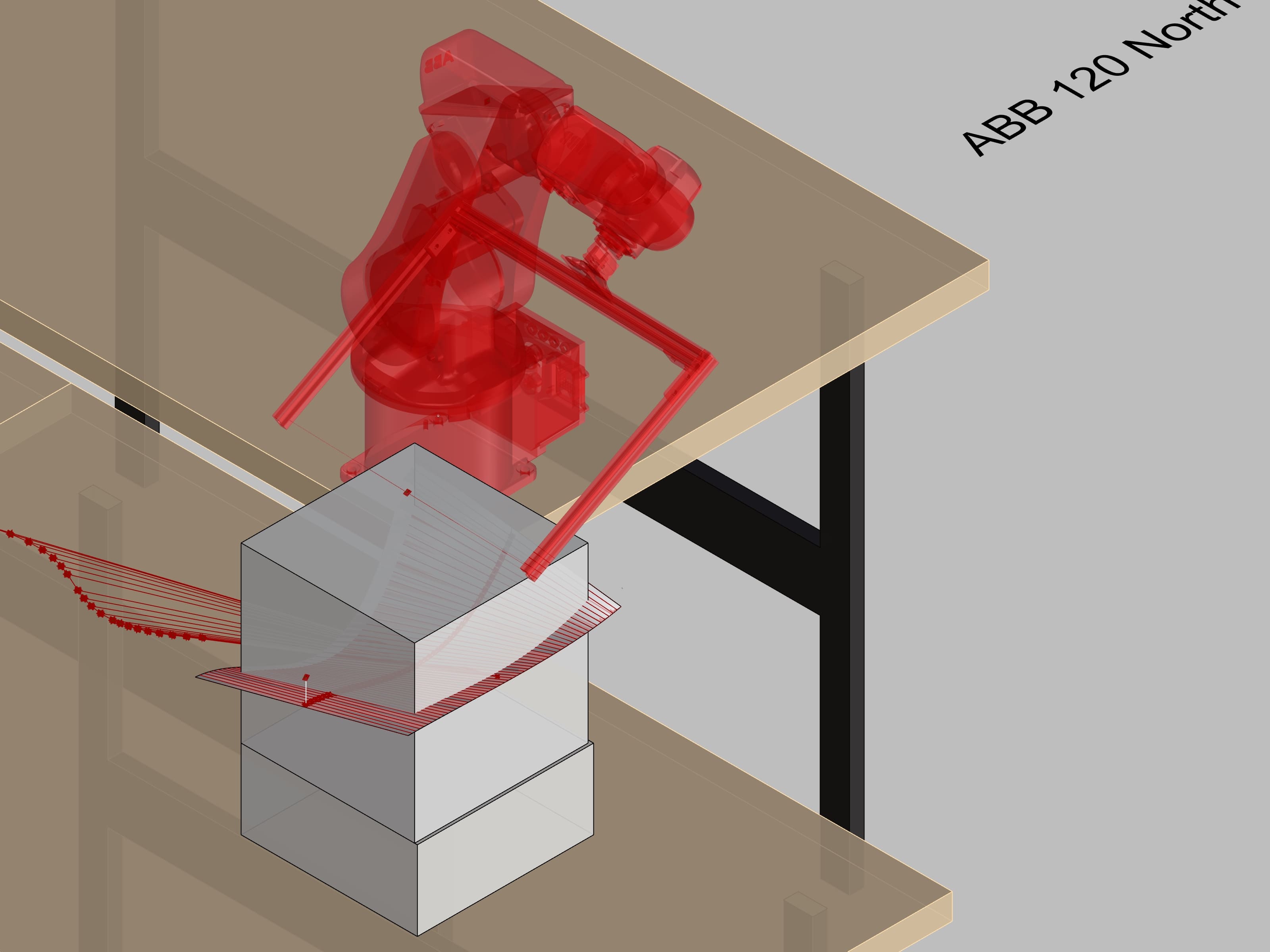
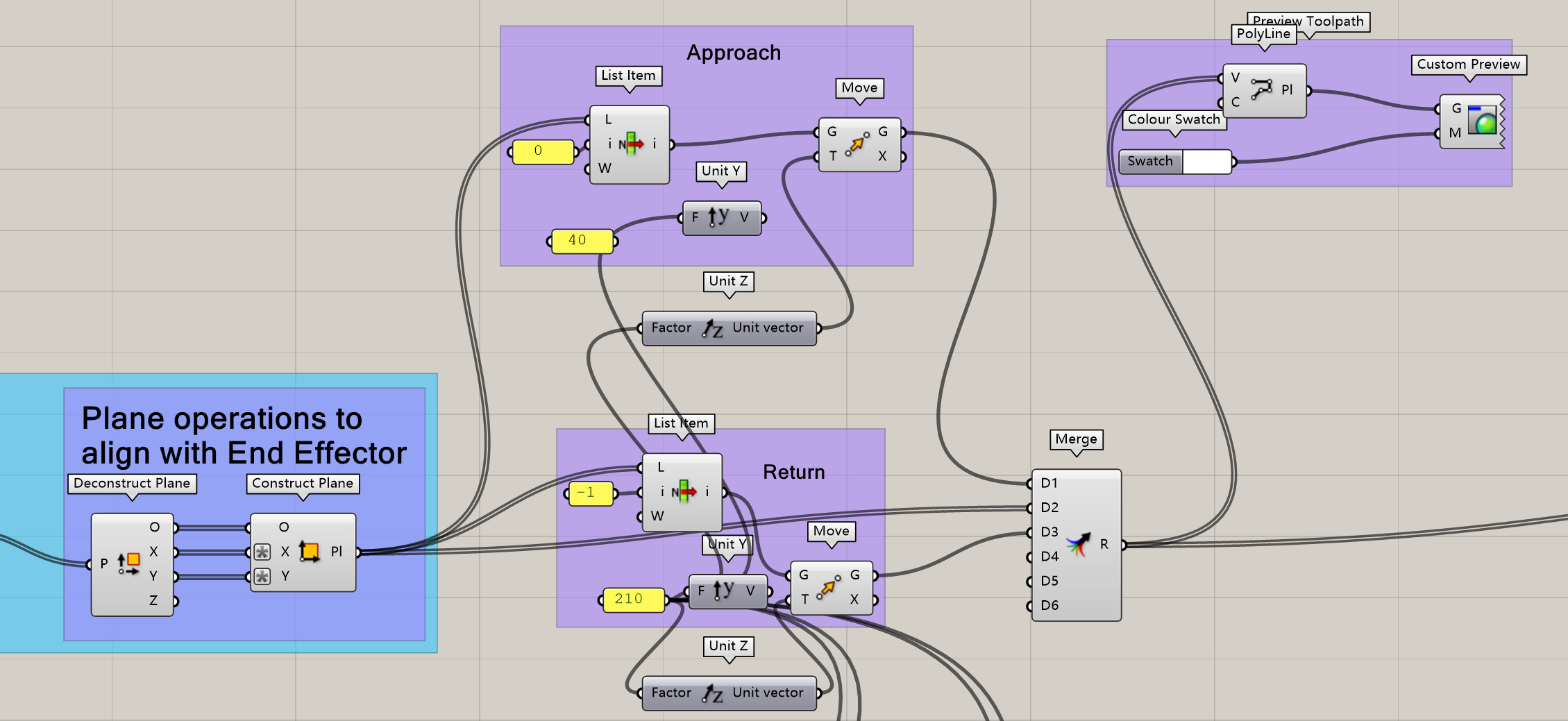
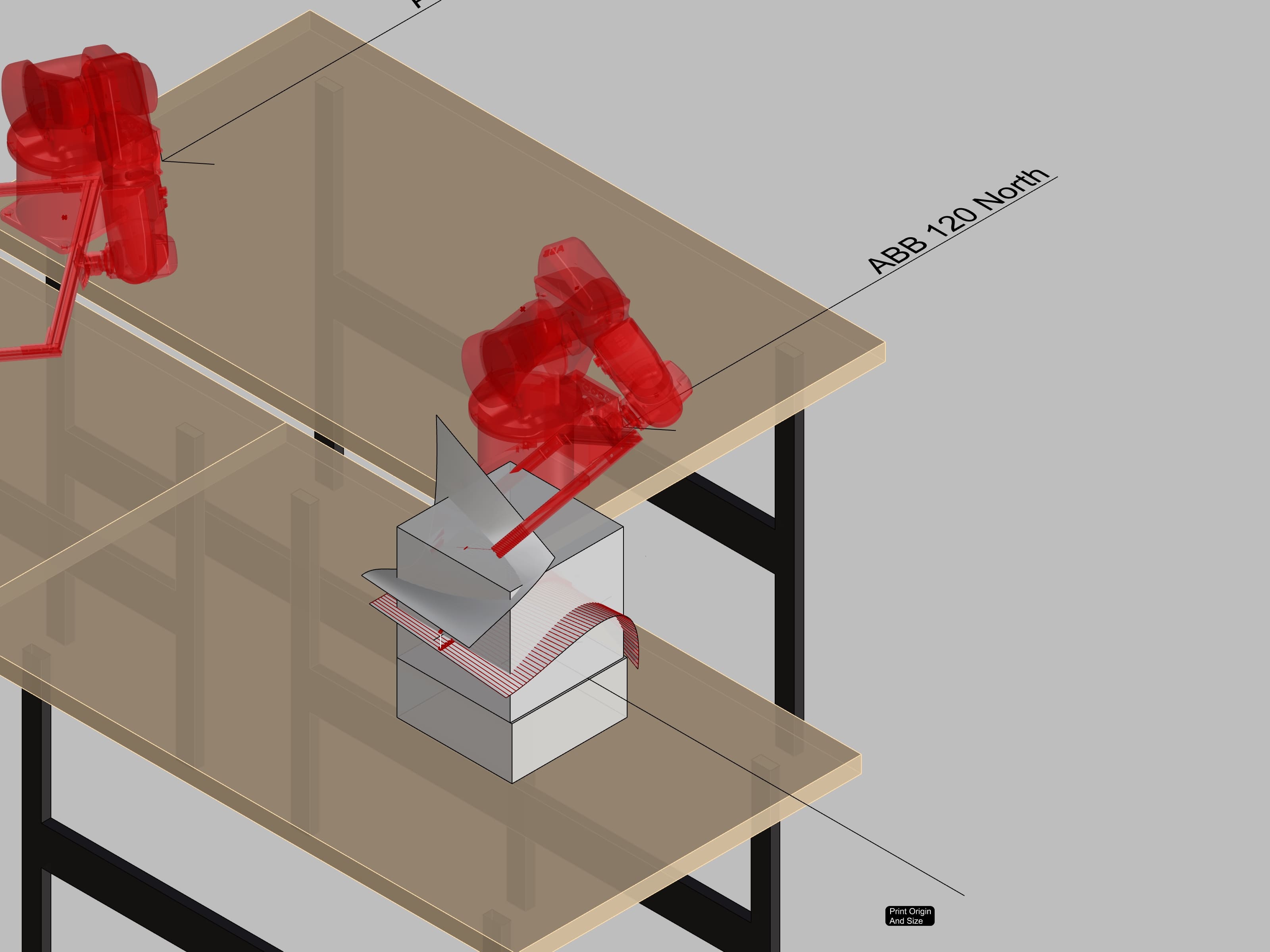
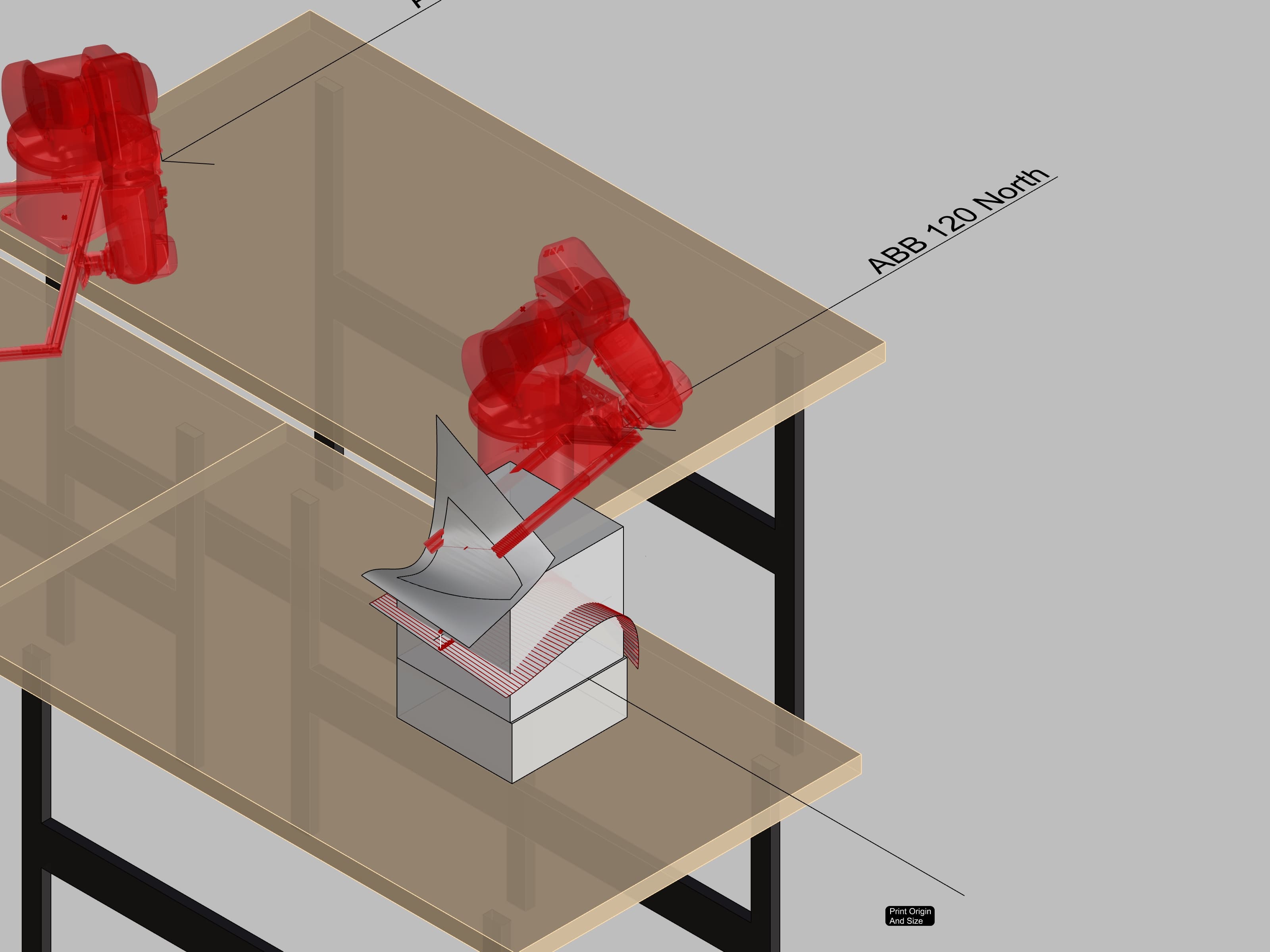
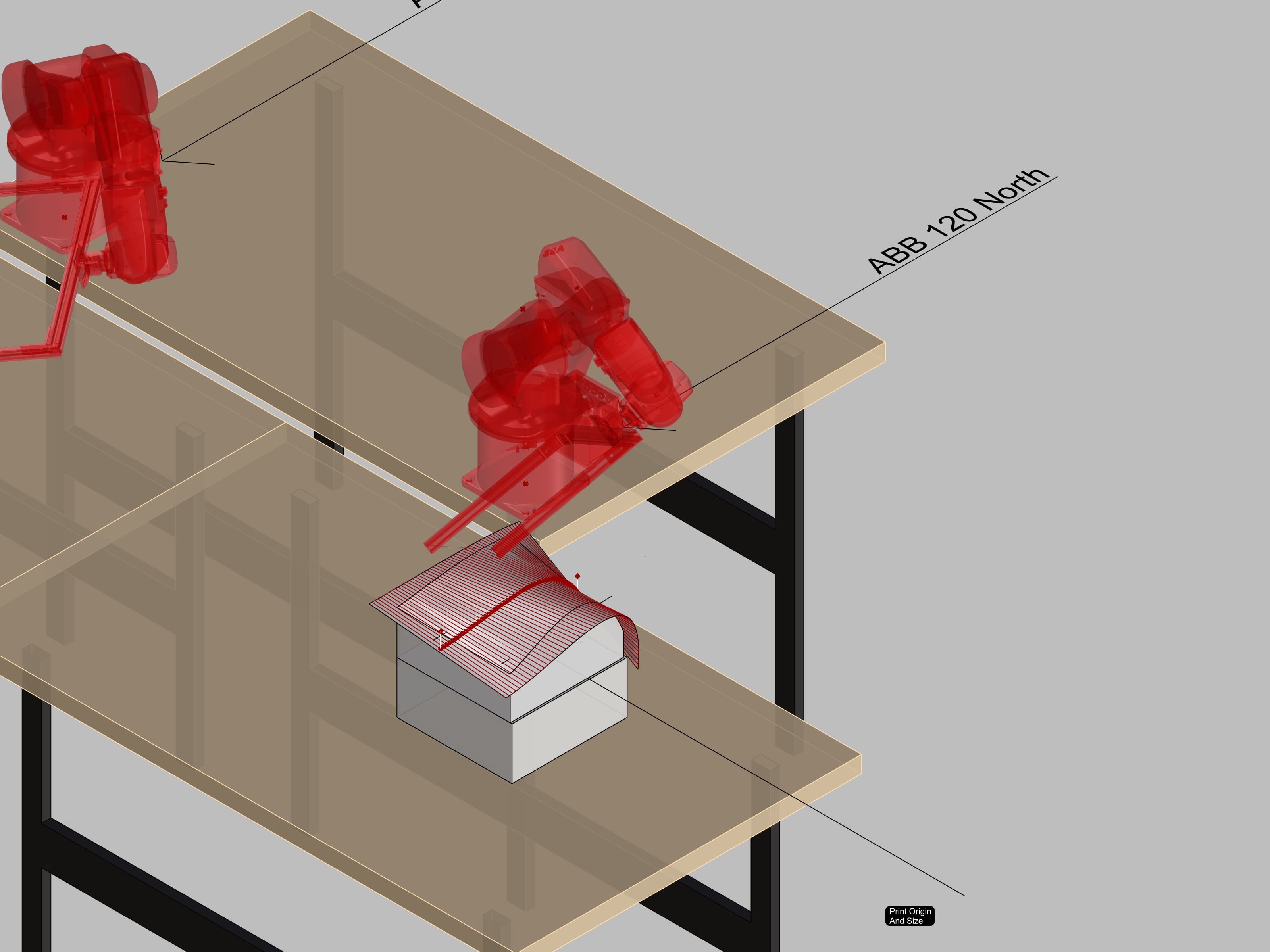
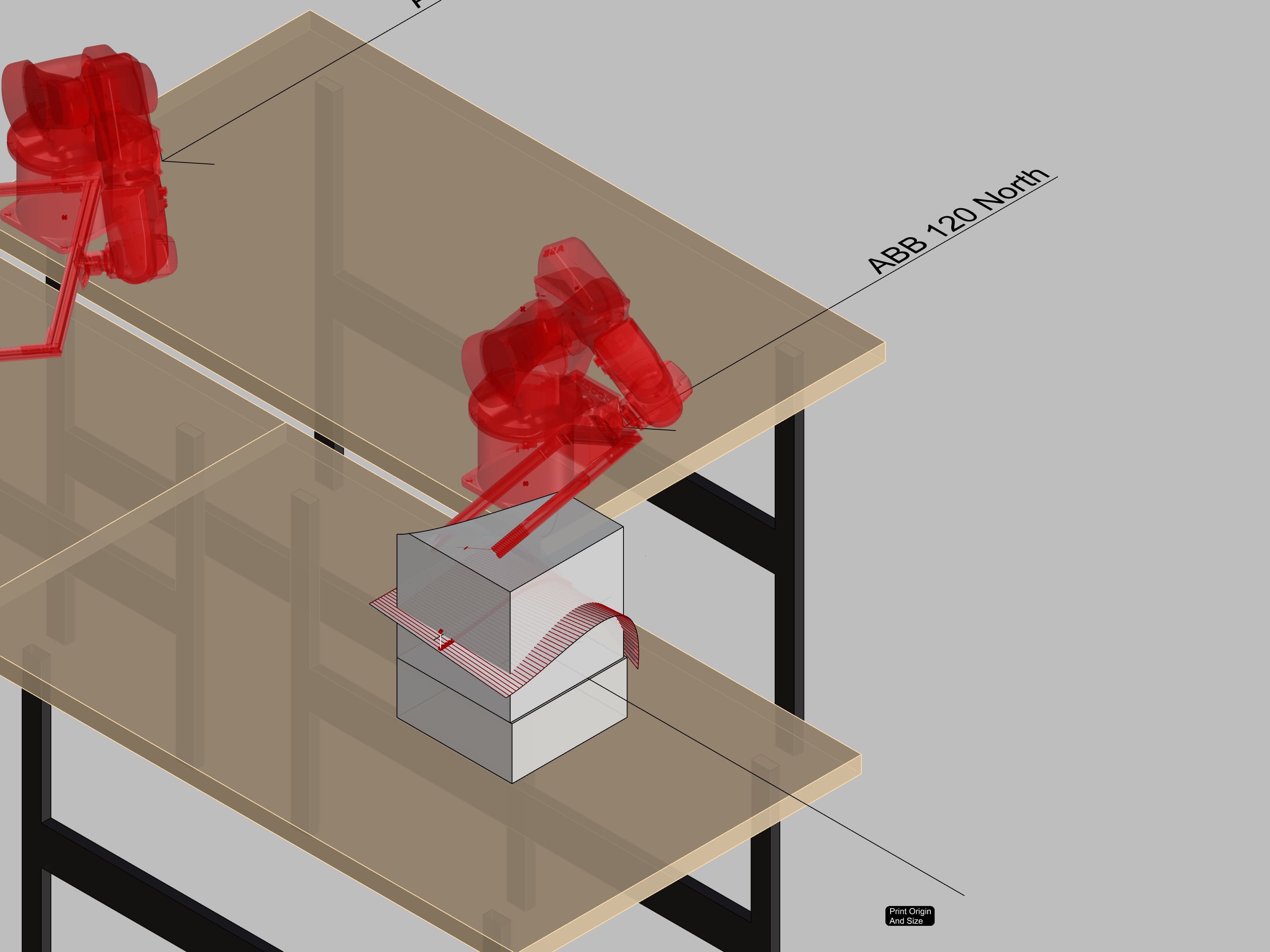
HOT WIRE CUT PHASE 2 SIMULATION OF ROBOT MOVEMENT
PHYSICAL MODEL IMAGES


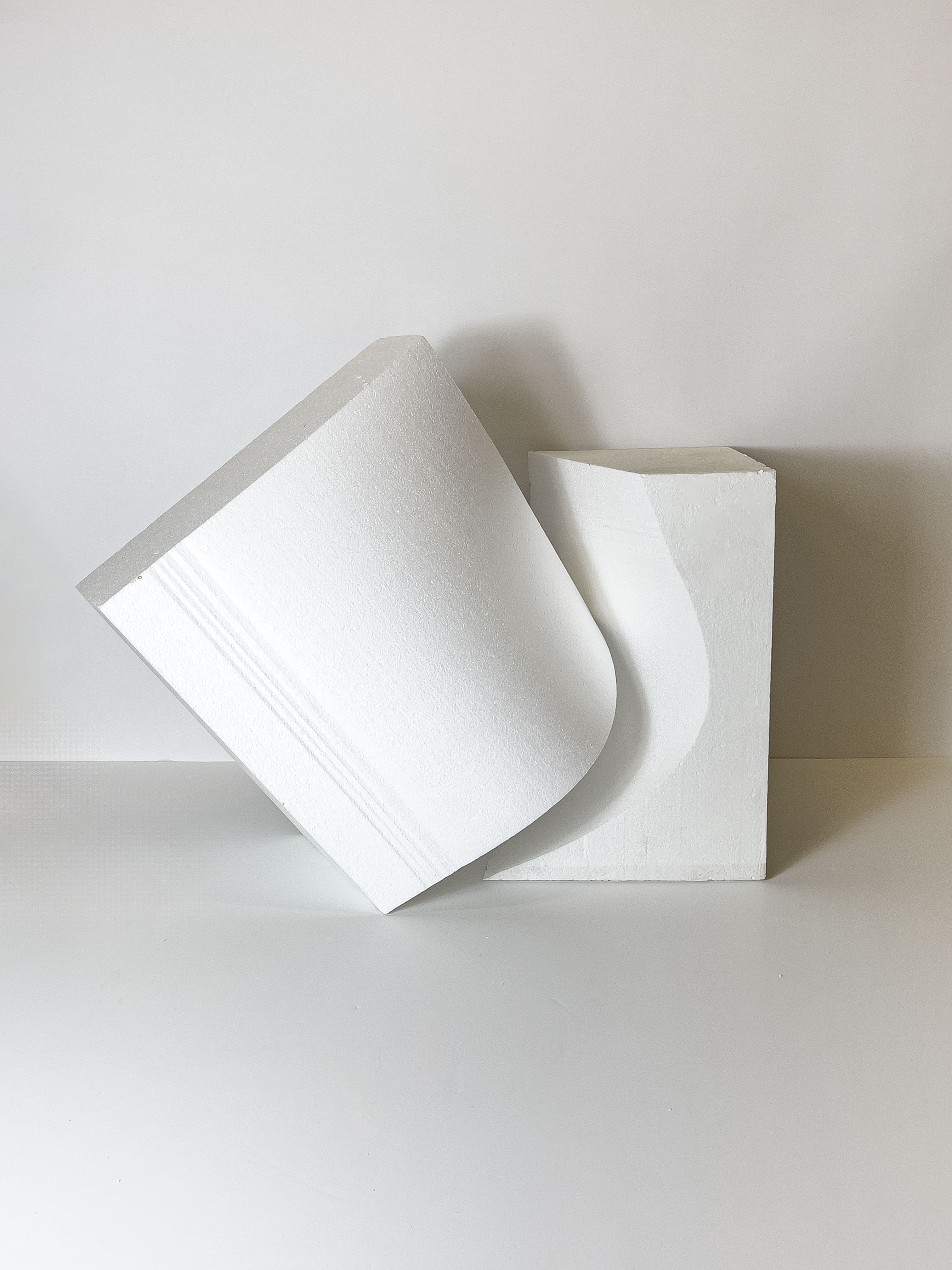
PHYSICAL MODEL IMAGES
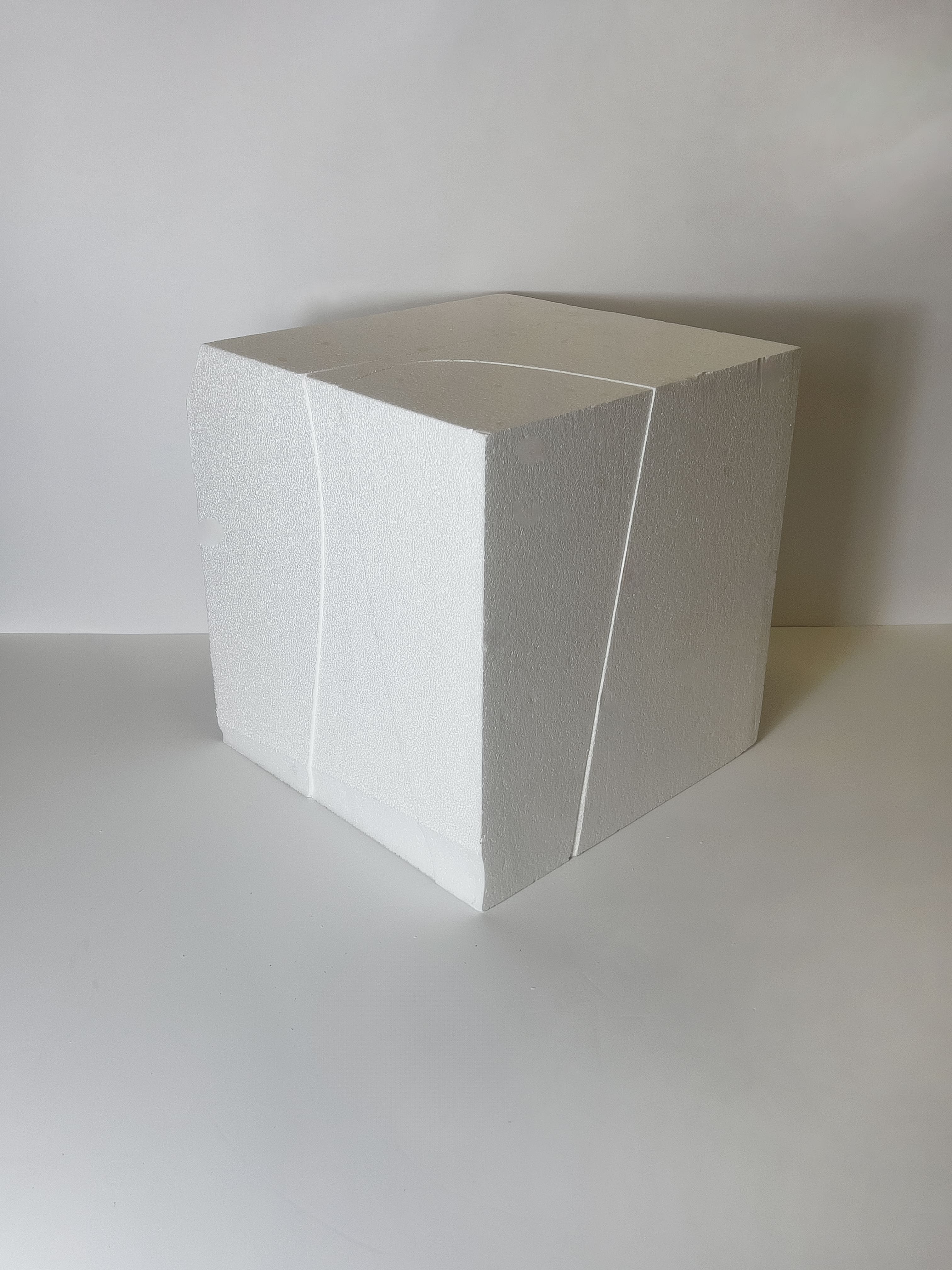
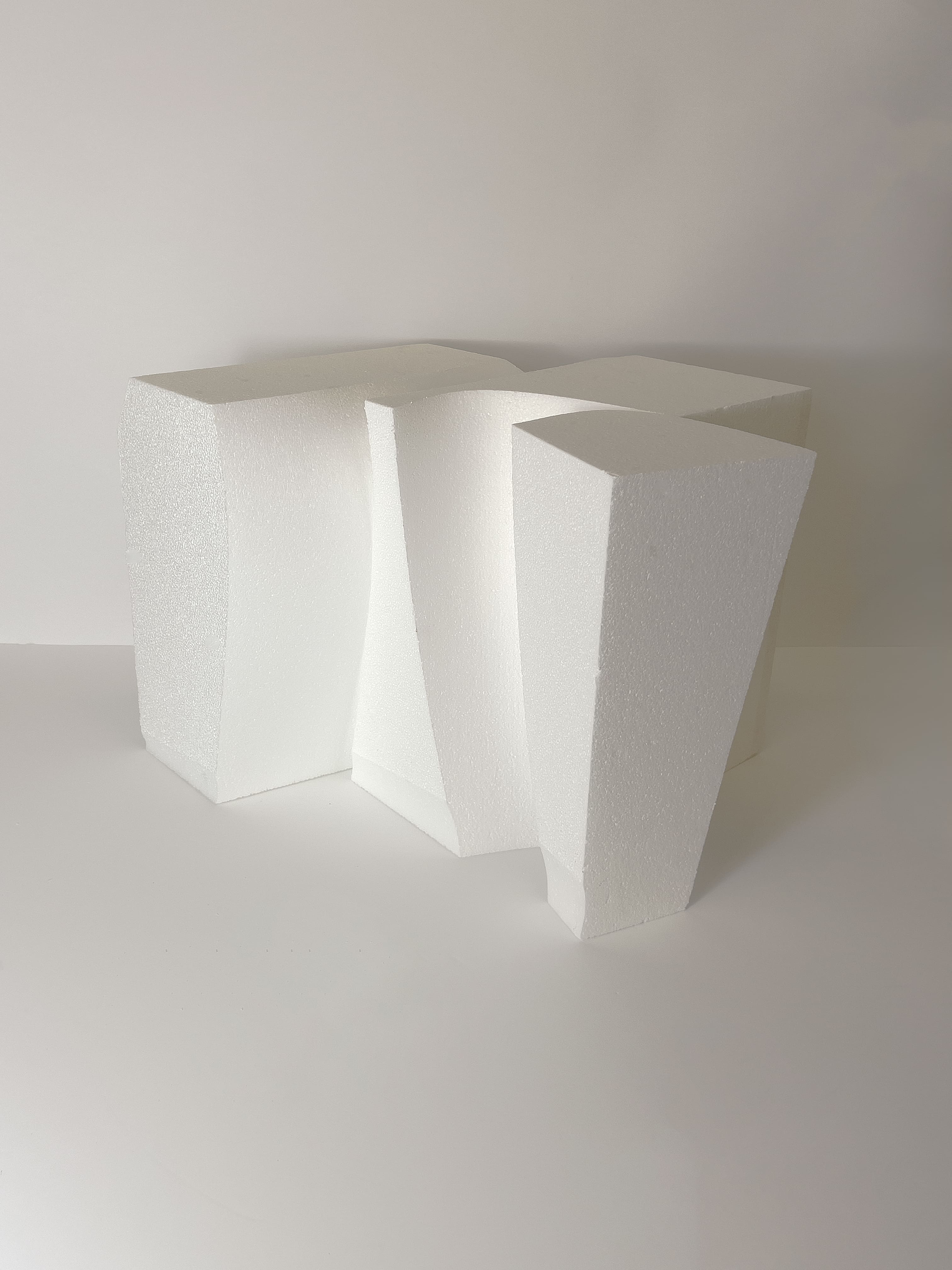


This project reflects an early exploration of how computational design and robotic fabrication can work together to transform simple foam blocks into precise, expressive forms. By iterating between digital simulation and physical cutting, the process revealed how machine-guided operations can generate unexpected spatial qualities while maintaining controlled precision. The work demonstrates a foundational understanding of toolpath logic, robotic constraints, and material behavior—laying the groundwork for more advanced integrations between design intention and automated making.