
Parametric Robotic Line Drawing
In this project, we explored the integration of parametric design and robotic fabrication to develop a precise and repeatable drawing workflow. Using Rhino and Grasshopper, we generated line-density fields and translated them into executable toolpaths for a robotic arm equipped with a custom multi-pen end effector. The system allowed the robot to render procedural line patterns directly onto physical surfaces, demonstrating the coordination between parametric pattern generation, toolpath planning, and robotic motion control. This project highlights how computational design methods can be materialized through advanced robotic operations.
Initial Path Visualization
An early preview of the drawing trajectories was generated in Grasshopper to evaluate how input data translated into robot motion. These test simulations focused on validating the pen contact points, motion continuity, and the feasibility of the drawing sequence.
PARAMETRIC ROBOTIC LINE DRAWING – PIPELINE
The workflow integrates computational design with robotic fabrication: converting image data into line fields, planning continuous toolpaths, validating reachability in simulation, and producing a physical drawing through precise robotic motion.

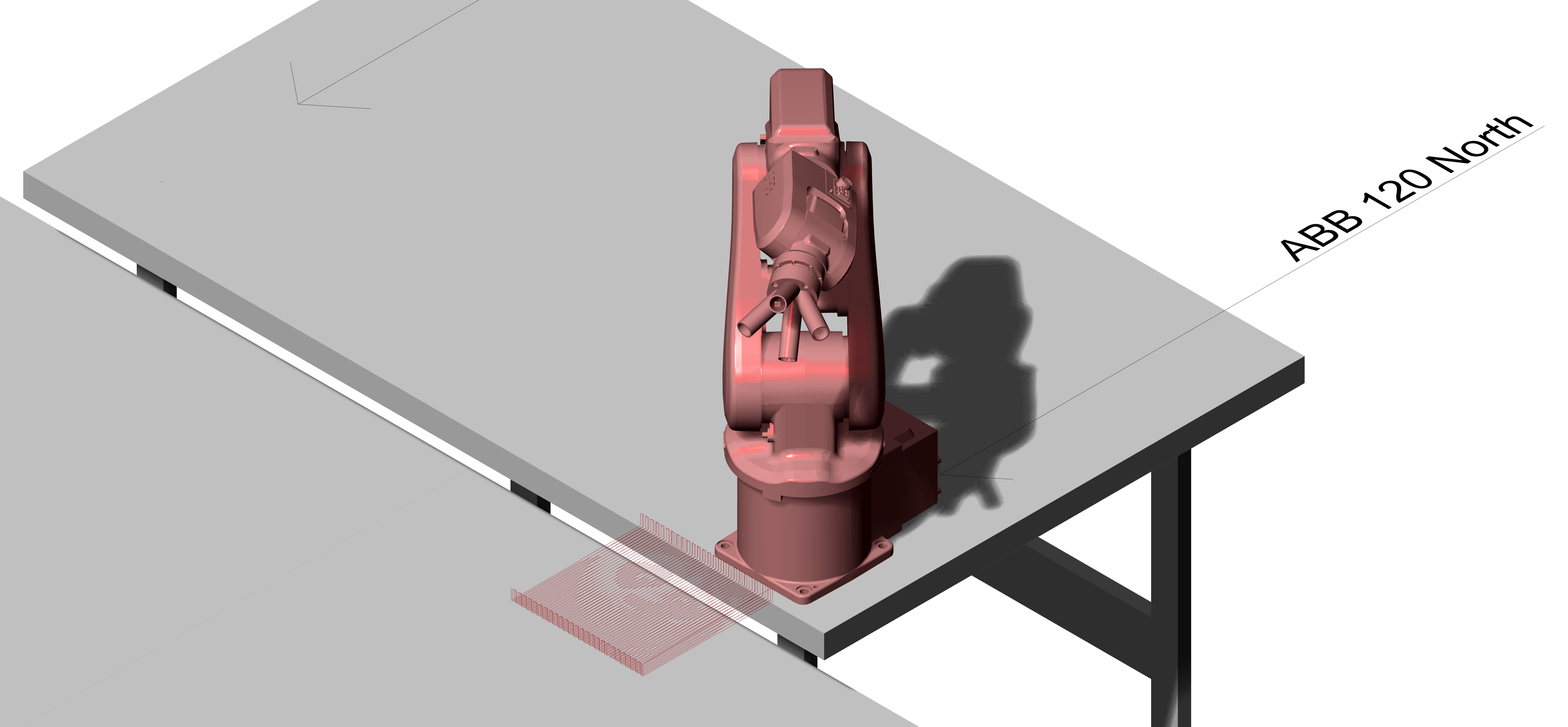
Input Image
Line Field Generation
Toolpath Planning
Robot Simulation
Physical Drawing
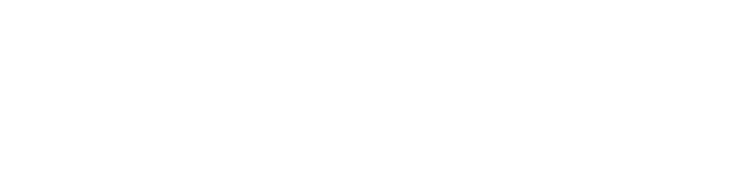
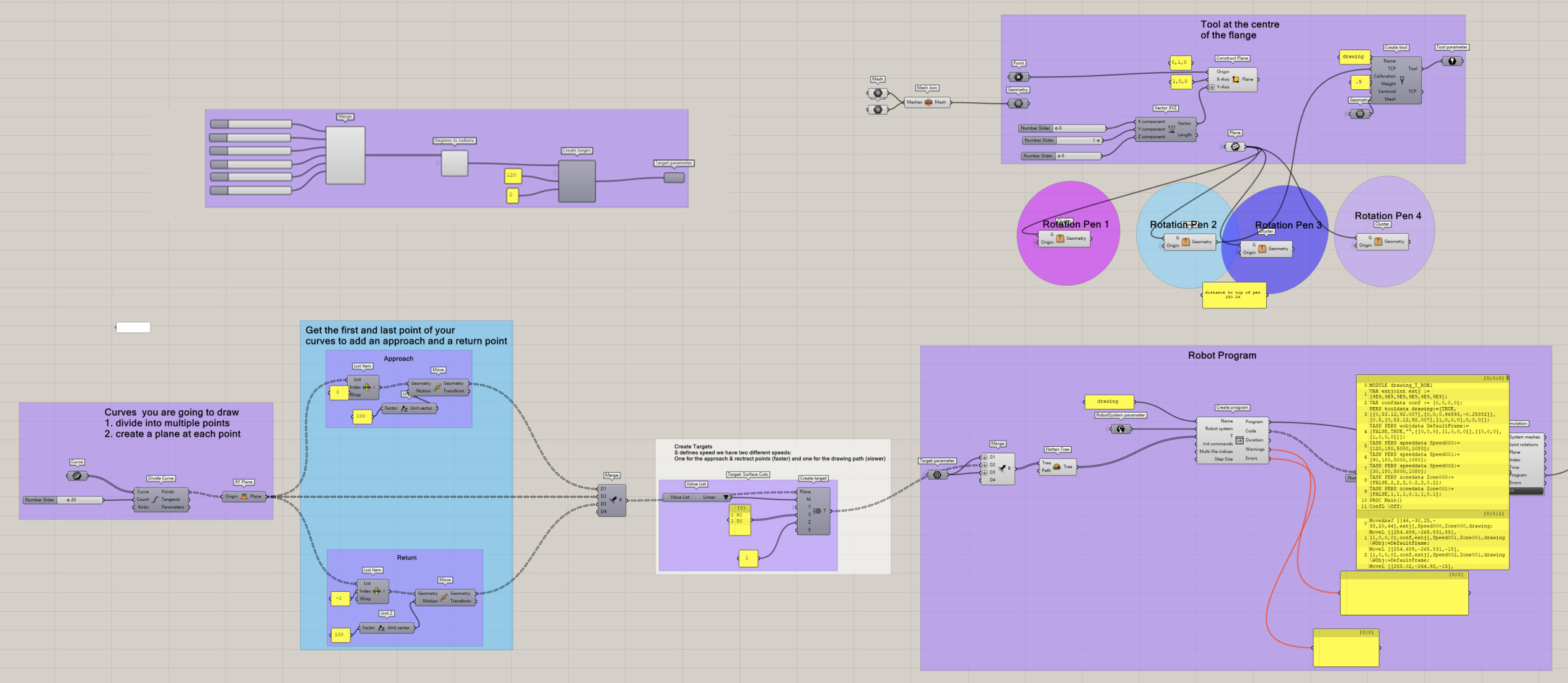
Parametric Toolpath Generation
The ABB robot was modeled within its physical workspace to determine the reachable drawing area and define the orientation of the multi-pen end effector. This step ensured that the generated toolpaths would be fully executable within the robot’s kinematic limits.
.jpg)
An input image was processed in Grasshopper to create a continuous line-density field. Variation in line curvature and spacing encodes tonal changes in the image, allowing the graphic to be represented through a single directional drawing logic.
The resulting line field was then converted into toolpaths suitable for robotic execution. The curves were optimized for direction, sequence, and spacing to ensure smooth, continuous motion for the multi-pen drawing tool.
The project demonstrates how computational image processing, parametric design, and robotic fabrication can be integrated into a precise and repeatable drawing workflow. It opens possibilities for machine-generated graphics, artistic rendering, and custom fabrication tools.